After some months resting, Silvestre’s got back to work this past weekend and the first thing we’ve done is to enhance the communication protocol in order to get even more data in real time on the PC. This data is essential to study software, hardware and mechanical aspects now that we’ve got a quite stable platform, and we need to focus on subtle things.
We plan to make some improvements over the way Silvestre speeds up and brakes so we definitely need to know how it behaves in both situations:
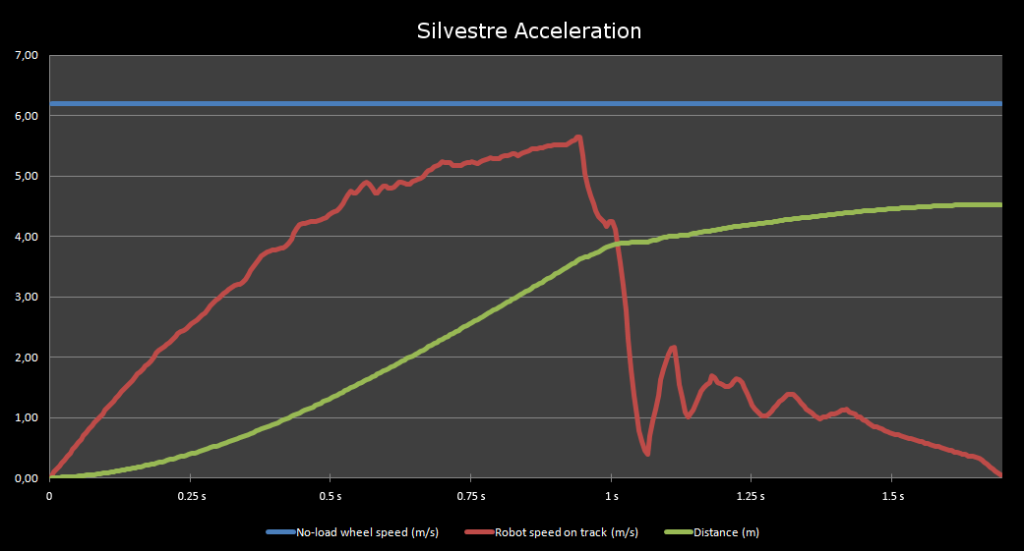
Blue line shows the maximum speed of the wheels (no friction) whereas red line shows Silvestre speed when motors are set to 100% from a stopped position. The track surface is pretty much the same as the one used in most of line followers contests in Spain and wheels were carefully cleaned beforehand. The result after mixing up the signals from the accelerometer and encoders (graph) showed that, during the acceleration phase, wheels didn’t skid.
As you can see, the robot can reach up to 5.6m/s in 0.9 seconds after having traveled a distance of about 4 meters and, in a typical straight in contests of around 2 meters, Silvestre would have to face a turn at about 5 meters per second yet making it harder to get back to a safe speed if the next turn is very close. Hence, we need to learn the track very well during the first laps so that we can precisely know the highest safe speed at every point of the circuit and also, we need to get a great control over the braking phase to slow down into such speed as fast as possible.
So far we had little time to improve the braking and graph isn’t showing good data from second 1 ahead but special attention has to be paid on how weights are transferred while deccelerating because the robot might lose traction thus making it to brake earlier. I look forward to working more on characterizing dynamic aspects of the robot and making the most out of it ![]()