Last week, we attended two of the most important championships in Spain with Silvestre and uXbot.
- In Hispabot, the track had a ramp which was pretty challenging for our robots since they were not designed with this in mind. The major problem was that the robots got blind for a while in their way up and also in their way down. This problem was worse for Silvestre since it’s larger and its sensors spent more time in the air, reason why the uXbot managed to get to the top of the podium with Silvestre right behind him on the 2nd place.
- Robolid hold a really crowded championship with around 80 robots taking part in the robotrackers category and 20 robots in the Line Following contest. Silvestre and uXbot had to fight with most of the best robots in Spain and they finally won with Silvestre in the 1st place and uXbot 2nd. On a side note, a new electronic system was used during the contest to measure lap times, average and top speeds and Silvestre’s top speed was over 5 meters per second (18 km/h)!
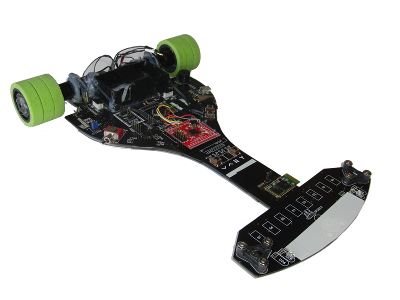
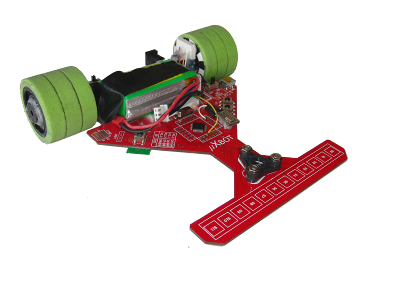
The most remarkable features of the robots are:
- DC Maxon motors
- FPGA to accurately read the quadrature signals from the encoders and real-time processing (Silvestre)
- Inertial sensors
- Track learning: the algorithm takes about 2-2.5 laps to identify when the lap starts over and extract the characteristics and speed-up/braking points.
- Adaptative behaviour: Throughout the laps, the robots modify their parameters (speed, speed-up/braking points,…) for each part of the track. This allows the robot to adapt themselves to the track conditions (dust, creases, …)
Below you can see a video from the training days to the final round of the latest contest. Some slow motion parts show how the robots performed over the ramp at Hispabot and how they had to fight with the skids right after the downhill 😉
D.